Phần mềm lõi phân tích ảnh viễn thám ENVI
Phần mềm xử lý viễn thám trên máy trạm có khả năng truy cập trực tiếp vào Server Hệ thống quản lý dữ liệu viễn thám Jagwire và cung cấp các bộ công cụ để hỗ trợ người dùng nhanh chóng hiển thị và dễ dàng xử lý các dữ liệu được thu từ vệ tinh loại vệ tinh phổ biến hiện nay được thu từ các thiết bị không người lái, bao gồm các dữ liệu siêu phổ (hyperspectral), đa phổ (multispectral), ảnh toàn sắc (panchromatic), dữ liệu LiDAR, dữ liệu vectơ và dữ liệu độ cao.
Phần mềm trên máy trạm cũng có khả năng kết nối, tích hợp các chức năng vào trong phần mềm GIS, cho phép tạo các Quy trình xử lý công việc theo từng tác vụ (task-based workflows) và lưu trữ thành công cụ mà không cần viết mã (code) bằng cách kết hợp giao diện lập trình (API) với giao diện người dùng trực quan; đồng thời khả năng chia sẻ các quy trình này với người dùng khác. Ngoài bộ công cụ xử lý dữ liệu thuộc phần lõi của ENVI, Hệ thống phần mềm còn bao gồm các Mô đun để xử lý các tác vụ chuyên biệt, bao gồm:
1. Mô đun Hiệu chỉnh hình học hình ảnh - ENVI Photogrammetry
Mô đun ENVI Photogrammetry bao gồm 3 công cụ:
- RPC Orthorectification Using DSM from Dense Image Matching thuộc nhóm Geometric Correction.
- Rigorous Orthorectification thuộc nhóm Geometric Correction > Orthorectification.
- Generate Point Clouds and DSM by Dense Image Matching thuộc nhómTerrain.
- Có chức năng đăng ký hình ảnh thu được với hệ tọa độ mặt đất và hiệu chỉnh hình học để loại bỏ các biến dạng trong quá trình chụp ảnh; cung cấp giao diện wizard-based để hướng dẫn người dùng tuần tự thực hiện qua từng bước hiệu chỉnh, tạo kết quả nhanh chóng, đạt độ chính xác cao.
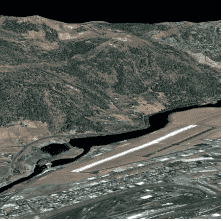
- Có chức năng tổng hợp được các điểm đám mây 3D (3D point clouds) và mô hình số bề mặt (DSM) từ ảnh hàng không quang học thông qua các kỹ thuật chụp ảnh multi-ray photogrmametry, tạo ra các tệp dữ liệu định dạng LiDAR (LAS), có thể sử dụng trực quan hóa nhiều loại point clouds và các công cụ xử lý trong phần mềm xử lý ảnh. Cho phép người dùng có thể tận dụng kho lưu trữ các ảnh thương mại lớn và sử dụng khả năng này để tạo sản phẩm point cloud và địa hình nơi mà hình ảnh LiDAR không khả thi hoặc do bị hạn chế về chi phí.
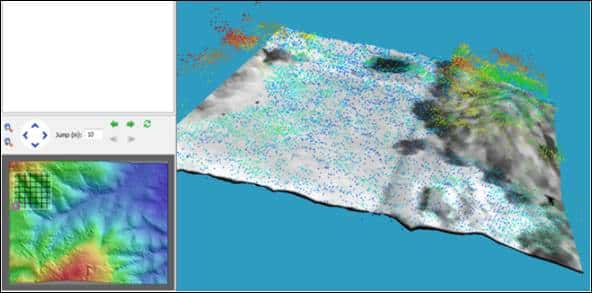
Hình 1. Tạo đám mây điểm theo thuật toán semi-global matching
2. Mô đun Trích xuất đối tượng - ENVI Feature Extraction
Mô-đun này sẽ tìm kiếm và trích xuất các đối tượng cụ thể từ các dữ liệu ảnh dựa vào các thuộc tính về không gian, phổ và đặc tính kết cấu/ cấu trúc của đối tượng. Sau đó phân loại thành các đối tượng đã biết sử dụng các quy trình sau:
- Rule Based: xác định đối tượng theo các quy tắc đã thiết lập dựa vào đặc tính như diện tích, chiều dài, phổ trung bình, kết cấu.
- Example Based: chọn mẫu đối tượng (mẫu của đối tượng đã biết) và gán các đối tượng chưa biết theo các mẫu đó.
- Segment Only: trích xuất những phân đoạn mà không thực hiện theo hai quy trình phân loại trên; cho phép người dùng tạo ảnh phân đoạn tùy biến theo ý kiến chủ quan.
- Có giao diện wizard-based hướng dẫn người dùng từng bước quy trình trích xuất từ nhập hình ảnh đến xuất kết quả và trích xuất các đối tượng theo yêu cầu; Có chức năng xem trước kết quả của từng bước thực hiện phân tích để điều chỉnh các tham số phân tích cho phù hợp tại bất kỳ thời điểm nào trong quy trình làm việc.
- Cho phép chia sẻ kết quả ở tất cả các giai đoạn của quy trình làm việc. Dễ dàng sử dụng các kết quả này để phân tích thêm, cho các báo cáo hoặc để chia sẻ với đồng nghiệp.
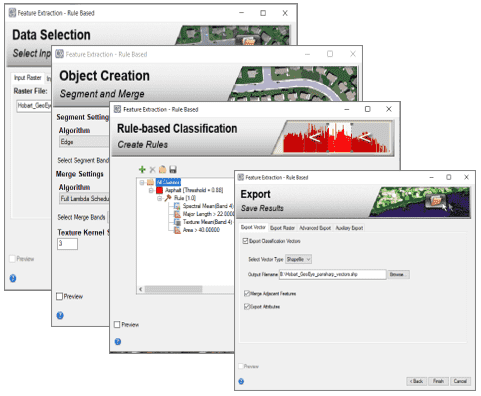
Hình 2: Quy trình hướng dẫn từng bước trích xuất đối tượng
 |
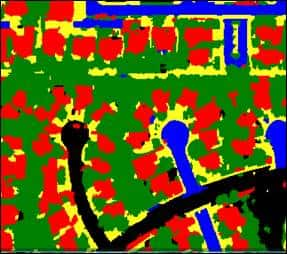 |
Hình 3: Phân loại và trích xuất các đối tượng quan tâm từ dữ liệu ảnh vệ tinh
3. Mô đun Trích xuất Mô hình số độ cao - ENVI DEM Extraction
Mô đun ENVI DEM Extraction gồm trình hướng dẫn DEM Extraction Wizard và 03 công cụ DEM:
- DEM Editting tool: cho phép tương tác để chỉnh sửa giá trị pixel trong vùng nghiên cứu
- Stereo Pair 3D Measurement tool: cho phép chọn một điểm thông dụng trên cả 2 cặp ảnh lập thể và tính toán giá trị độ cao tại vị trí điểm đó.
- Epipolar 3D Cursor tool: cho phép đo 3D trong môi trường xem 3D lập thể trên cơ sở cặp ảnh epipolar hiện có.
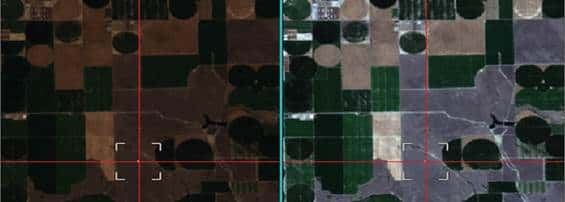
- Quá trình trích xuất DEM yêu cầu một cặp ảnh lập thể chứa hệ số đa thức hợp lý (RPC) từ ảnh hàng không hoặc ảnh lập thể để tạo ra các điểm khống chế và tính toán mối quan hệ giữa các cặp ảnh lập thể.
 |
 |
Hình 4: Tạo mô hình DEM có chính xác cao về mặt không gian
- Có trình hướng dẫn xử lý Trích xuất DEM, hướng dẫn người dùng tuần tự thực hiện thông qua các bước và cung cấp đầy đủ các thông số của đối tượng theo yêu cầu. Các công cụ này phải có trong bộ Toolbox của ENVI để người dùng có thể chạy từng bước riêng lẻ hoặc sử dụng quy trình trích xuất DEM như trong sơ đồ dưới đây.
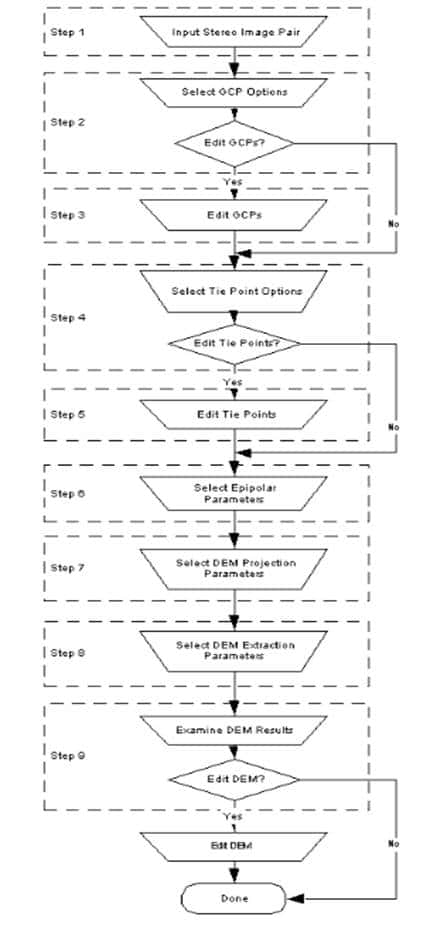
Hình 5: Trình hướng dẫn DEM Extraction Wizard
4. Mô đun Hiệu chỉnh khí quyển - ENVI Atmospheric Correction
Mô-đun này hiệu chỉnh nhiễu khí quyển để tạo dữ liệu ảnh có độ tin cậy cao. Đây là một trong các bước tiền xử lý dữ liệu, góp phần đảm bảo độ chính xác trong việc phân tích ảnh phản xạ bề mặt. Giải pháp linh hoạt này cung cấp không chỉ kỹ thuật tiên tiến dựa vào đặc tính vật lý ảnh mà còn hiệu chỉnh khí quyển nhanh on-the-fly để xử lý ảnh theo thời gian thực và sử dụng cho cả dữ liệu ảnh đa phổ và ảnh siêu phổ.
Mô đun ENVI Atmospheric Correction cung cấp hai công cụ hiệu chỉnh khí quyển, bao gồm:
- QUick Atmospheric Correction (QUAC®): là phương pháp tự động hiệu chỉnh khí quyển để thu được quang phổ phản xự từ ảnh đa phổ và siêu phổ.
- Fast Line-of-sight Atmospheric Analysis of Spectral Hypercubes (FLAASH®): thực hiện hiệu chỉnh các kênh ảnh từ vùng ánh sáng nhìn thấy đến cận hồng ngoại và hồng ngoại sóng ngắn. Đối với vùng nhiệt (trong dải phổ điện từ) sử dụng hiệu chuẩn Thermal Atmospheric Correction. FLAASH có thể hiệu chỉnh ảnh trực giao hoặc ảnh nghiêng đều cho kết quả tốt.
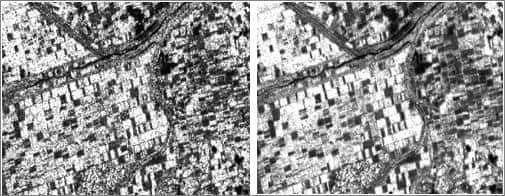
Hình 6. Kết quả trước và sau hiệu chỉnh khí quyển
5. Mô đun SARscape Basic
Mô-đun gồm một tập hợp chức năng xử lý để chuẩn bị dữ liệu ảnh phục vụ phân tích và hiển thị. Bao gồm các chức năng: lấy nét (focusing), multi-looking, đồng đăng ký (co-registration), lọc nhiễu (despeckling), trích xuất đối tượng bao gồm sự mạch lạc (coherence), mã hoá địa lý (geocoding), hiệu chuẩn bức xạ (radiometric calibration và normalization), phân đoạn (segmentation), và ghép ảnh (mosaicking). Tập hợp các chức năng xử lý này hỗ trợ đa mục đích như từ trực quan hóa ảnh, đến nhập và nội suy dữ liệu DEM, đến chuyển đổi tọa độ và lập bản đồ.
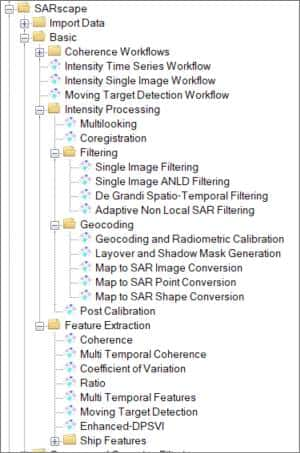
Hình 7. Tập hợp các chức năng xử lý trong SARScape Basic Module
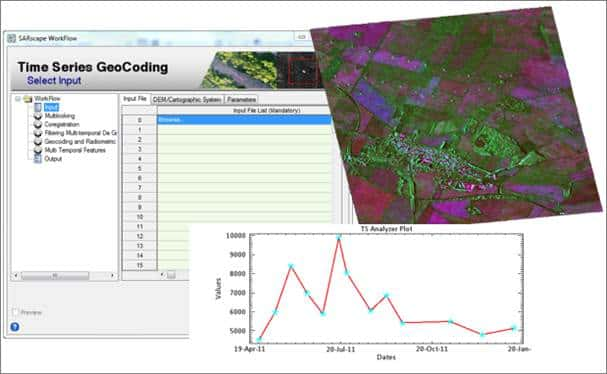
Hình 8. Quy trình xử lý cường độ chuỗi dữ liệu (Intensity Time Series Workflow) trong SARScape Basic Module
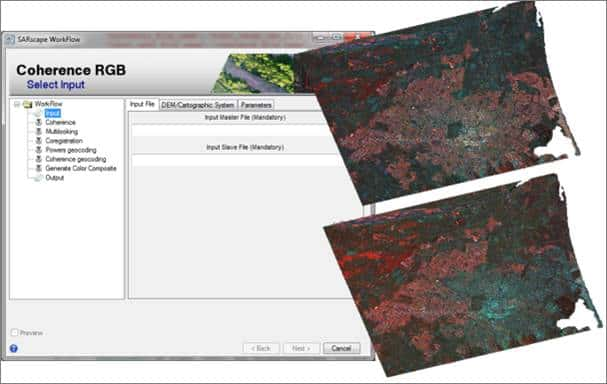
Hình 9. Quy trình phát hiện thay đổi (Cohenrence Change Detection Workflow) trong SARScape Basic Module
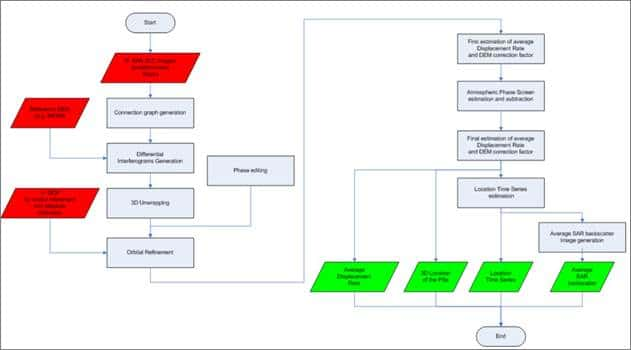
6. Mô đun SARscape Interferometry
Mô-đun này hỗ trợ xử lý dữ liệu giao thoa kế SAR, tạo ra DEMs với kỹ thuật InSAR và bản đồ biến dạng bề mặt với kỹ thuật DInSAR.
- Kỹ thuật DInSAR có thể phát hiện chuyển dịch vài centimeter theo thời gian tính theo ngày đến theo năm. Mô-đun giao thoa này được ứng dụng để giám sát trong địa vật lý các thảm họa thiên nhiên như động đất, núi lửa và sạt lở đất. Đồng thời cũng rất hữu ích để áp dụng trong kết cấu xây dựng, đặc biệt là giám sát sự sụt lún và sự ổn định cấu trúc.
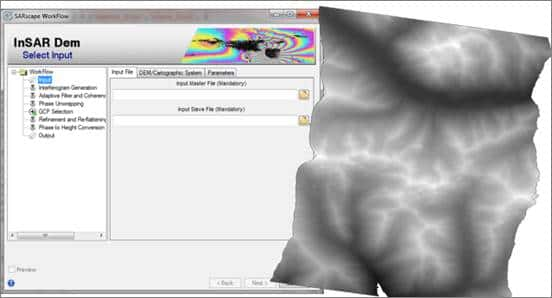
Hình 10. Quy trình xử lý InSAR tạo DEM trong SARScape Interferometry Module
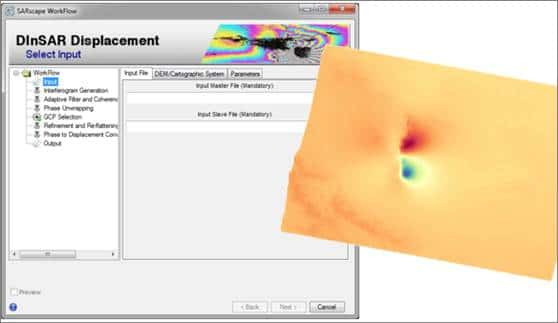
Hình 11. Quy trình xử lý DInSAR phát hiện chuyển dịch trong SARScape Interferometry Module
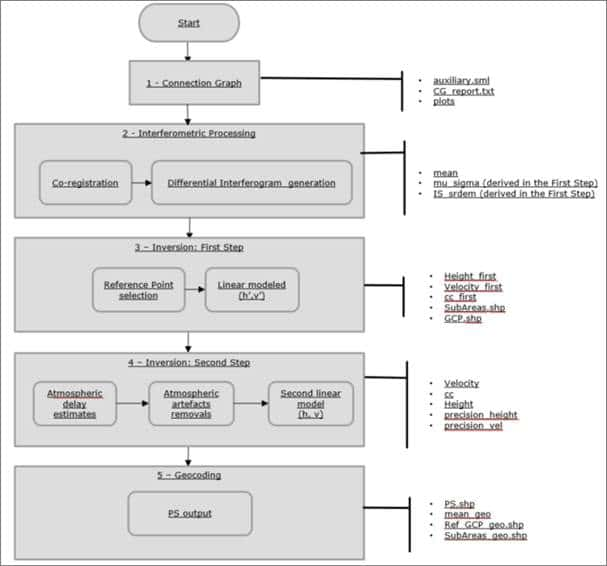
7. Mô đun SARscape Interferometry Stacking
Mô-đun này xác định sự dịch chuyển của các đối tượng địa lý riêng lẻ, bao gồm 02 kỹ thuật:
Persistent Scatterers (PS): phát hiện các chuyển dịch rất nhỏ (hàng mm) của các điểm/hoặc nhóm điểm mục tiêu và suy ra tốc độ biến dạng biến thiên theo thời gian – đặc biệt đối với các mục tiêu phản xạ rất ổn định (đối tượng nhân tạo như tòa nhà, cầu/đập) mà có thể chuyển dịch độc lập với các khu vực xung quanh. Kỹ thuật này sử dụng tối thiểu 20 dữ liệu ảnh SLC đầu vào, tạo thành cặp giao thoa và mô hình hồi quy tuyến tính linear model để ước lượng sự biến dạng.
Hình 12. Kỹ thuật xử lý PS trong SARScape Interferometry Stacking Module
Small Baseline Subset (SBAS): sử dụng hiệu quả sự kết hợp của giao thoa vi sai. Khi sử dụng kỹ thuật SBAS cần tối thiểu 20 dữ liệu ảnh để phân tích chồng xếp dữ liệu SAR thu được nhằm phát hiện những chuyển dịch nhỏ trong một khu vực rộng lớn, khi không xác định các mục tiêu nhưng chuyển dịch tương quan xẩy ra trong tự nhiên. Kỹ thuật SBAS có thể cung cấp thông tin và quản lý các sự kiện địa vật lý xẩy ra trong khoảng thời gian quan trắc như động đất; cung cấp phép đo chính xác và đáng tin cậy.
Hình 13. Kỹ thuật xử lý SBAS trong SARScape Interferometry Stacking Module
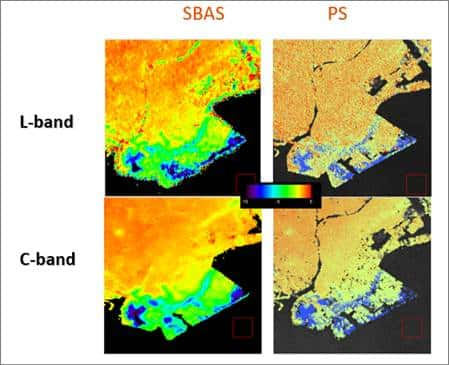
Hình 14. Kết quả xử lý kỹ thuật PS và SBAS trong Interferometry Stacking Module
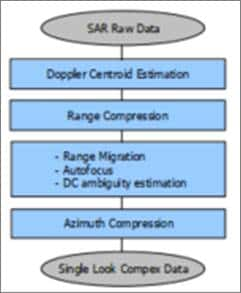
8. Mô đun SARscape Focusing
Mô-đun Focusing tạo ra các ảnh phức (SLC) dựa vào thuật toán miền tần số ‘ω - Ҡ’, cho phép thực hiện chuyển đổi từ dữ liệu thô thành dữ liệu single-look complex để thực hiện xử lý giao thoa.
Hình 15. Quy trình xử lý tạo ảnh Single look (SLC) của SARScape Focusing Module
9. Mô đun SARscape Filter
Dữ liệu SAR thu được có đặc tính là Nhiễu (Đốm), liên quan với phản xạ radar trong mỗi pixel trong ảnh. Do đó, gây ảnh hưởng đến nhận diện các đối tượng trên ảnh, cần thực hiện các bước lọc Nhiễu.
- Mô-đun Gamma and Gaussian Filter gồm nhiều các bộ lọc riêng biệt của SAR, mở rộng phạm vi bộ lọc của SARScape Basic. Thuật toán sử dụng trong mô-đun này đặc biệt hiệu quả trong việc làm giảm nhiễu nhưng vẫn bảo toàn phản xạ của radar, đặc tính kết cấu và độ phân giải không gian.
Hình 16. Ảnh trước và sau khi áp dụng thuật toán lọc De Grandi của Filter Module
10. Mô đun SARscape ScanSAR Interferometry
- Cung cấp khả năng để xử lý dữ liệu InSAR và DInSAR ở khu vực rộng lớn (400 km2).
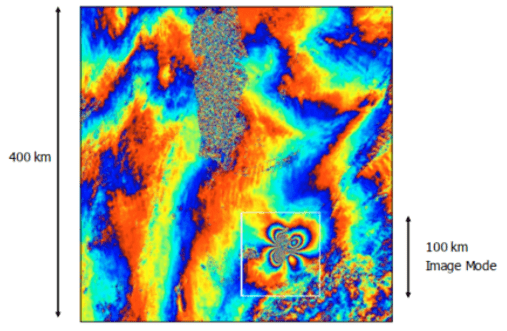
Hình 17. ScanSAR Differential Interferometry dữ liệu ENVISAT ASAR wide swath
11. Mô đun SARscape Polarimetry & PolInSAR
Mô-đun này xử lý dữ liệu SAR phân cực (polarimetric) và giao thoa phân cực (polarimetric interometric), cho phép giảm thiểu các tác động lên toàn bộ hệ thống thu nhận SAR phân cực, thu được hình ảnh chính xác nhất có thể từ các phép đo, ước lượng của ma trận tán xạ. Mô-đun này được ứng dụng trong việc giám sát thành phần rừng, phát hiện chặt phá rừng, cháy rừng, giám sát nông nghiệp, xác định sinh khối, chiều cao và các chỉ số khác của thực vật.

Hình 18. Ảnh chụp cực HH và VV vùng lúa

Hình 19. Bản đồ vùng lúa kết hợp HH/VV
12. Xử lý dữ liệu theo chuỗi quy trình với ENVI Modeler
- ENVI Modeler cho phép xây dựng các quy trình xử lý luồng công việc bằng cách thêm vào các công cụ, lớp dữ liệu rasters, vector, sau đó kết nối các công cụ và các lớp dữ liệu này thành chuỗi. Có thể sử dụng để thực hiện các công việc như: giải đoán ảnh, dự báo, cảnh báo và phân tích không gian.
- Cung cấp khả năng chỉnh sửa và thay đổi các bước trong chuỗi trực tiếp trên giao diện ENVI Modeler, sử dụng đầu ra của công cụ hoặc quy trình này là đầu vào của công cụ và quy trình tiếp theo.
- Có khả năng chỉ phải xây dựng một lần duy nhất và chia sẻ cho tất cả người dùng khác trong cơ quan của mình hoặc cho cộng đồng, ở đó người dùng chỉ cần nhập vào dữ liệu đầu vào và cho ra kết quả cuối cùng mà không cần phải thực hiện các công đoạn trung gian rời rạc nữa.
- Cho phép xử lý đa dạng các định dạng dữ liệu theo vòng lặp đi lặp lại của nhiều quy trình nhiệm vụ từ đơn giản đến phức tạp
- Có khả năng chủ động chạy từng bước một, hay chỉ chạy các bước được chọn, hoặc chạy tổng thể cho toàn mô hình
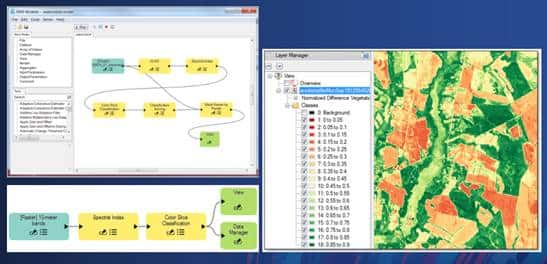
Hình 20: Cấu hình tùy biến chuỗi quy trình xử lý dữ liệu ảnh chuyên biệt
13. Mô đun Học sâu (Deep Learning)
- Có khả năng tạo các mô hình đáng tin cậy để phân loại hình ảnh, giúp loại bỏ các rào cản đối với việc thực hiện học sâu dữ liệu địa không gian và sử dụng để giải quyết các vấn đề trong Nông nghiệp, Tiện ích, Giao thông vận tải, Quốc phòng và các lĩnh vực khác chỉ với các cú nhấp chuột.
- Có tính năng hợp nhất thông tin như chỉ số quang phổ (spectral indices), dữ liệu độ cao hoặc chuyển đổi dữ liệu để tạo các trình phân loại chính xác hơn.
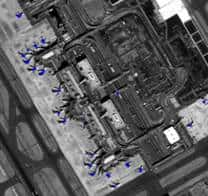
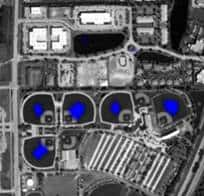
- Có tính năng tự động phát hiện mục tiêu đạt hiệu suất cao trên ảnh Pan, RGB, đa phổ (MSI), siêu phổ (HIS), SAR, LiDAR và bộ dữ liệu các điểm point cloud, bao gồm các đối tượng như: Máy bay, Bể chứa, Sân vận động, Sân điền kinh, Khói thuốc, Mây, Bể bơi, Tòa nhà, Đường trải nhựa, Cầu vượt.
 |
 |
|
Sân bay quốc tế Tokyo, ảnh IKONOS Pan, phát hiện 20120 máy bay và có 1 vị trí không chính xác |
Sân bóng chày, Orbview Pan, 5/5 sân bóng được nhận diện với kích thước đầy đủ, không có vị trí lỗi |
Hình 21: Khả năng nhận diện đối tượng bởi Chức năng Học sâu
 |
 |
 |
|
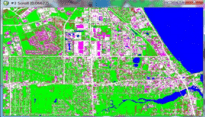
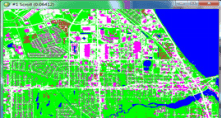
Ảnh WV-2, 8 bit, 4 bands khu vực Melbourne, FL |
Kết quả phân loại sử dụng công cụ phân loại trong phần mềm của Hệ thống |
Kết quả phân loại xử lý với |
Hình 22: Khả năng Phân loại đối tượng trên hình ảnh với Chức năng Học sâu